伏雨朝寒悉不胜,那能还傍杏花行。去年高摘斗轻盈。漫惹炉烟双袖紫,空将酒晕一衫青。人间何处问多情。 ———— 纳兰容若
Houdini
在制作塔楼的瓦片的时候,遭遇到了法线的问题,copytopoint开始要应用三维旋转了,于是乎开始查文档和案例。总结了一下关于VEX中对旋转的表达同时也查了关于旋转的一些总体的表示方法。
旋转
常见的旋转的表示方法:矩阵(旋转矩阵),欧拉角,四元数。
1、矩阵 每一列表示旋转后的单位矢量方向
2、欧拉角:
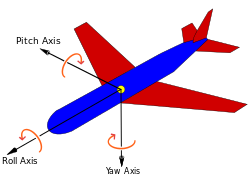
将旋转分为roll(筒滚z),pitch(俯仰x),yaw(偏航y)三个轴向的三个维度,但是会产生万向锁问题——两轴重合损失自由度:有一个平行于x轴的向量,我们先将它饶y旋转直到它平行于z轴,这时,我们会发现任何饶z的旋转都改变不了向量的方向(废掉了一个方向的自由度),即万向节死锁。
3、四元数: 为了深入理解旋转,在这里简单的解释一下这个晦涩难懂的用法在几何空间的理解,理解的主要参考是知乎各个答主不同角度的解释,以及最重要的是有一个大神讲了相关的视频[四元数的可视化](我反正也是一知半解,没有特别懂) (网上还有很多大佬有数学方面的解释,代数推导看了一遍,只能说勉勉强强能看明白,以后要当技术美术的人了就还是得回到图形化认知来,我这就简单说一下我粗浅的形象化认知。)
先普及四元数基本特点和一些基本的数学结论
(1)优点 四元数可以很方便插值,因为高维的球体连线代表的值之后在三维空间中就是均匀的旋转,而且表示的数字很少,只需3个数字来存储,计算速度也比矩阵快。
(2)特性与结论
q=[cosθ/2,sinθ/2 vector] 最终旋转结果是* a` = q a q **
其中,q*是q的共轭四元数——虚部取负。一般称之为“quaternion sandwich”。四元数的点乘是一般的计算方法,推导后可以优化成 q1q2=(st−u⋅v,sv+tu+u×v) st分别为q1q2的实部,uv分别为q1q2的虚部
p四元数就是四维空间的向量,虚部符合以下的规律
ij=−ji=k
jk=−kj=I
ki=−ik=j
i2=j2=k2=ijk=−1观察一下这几组数,这几个条件——反交换律,三个数乘起来是1,不就是叉乘的结果么。也就是让 i,j,k 分别对应到三维坐标系的三个坐标轴方向的单位向量。这就是图形理解的基础。
(3)回归二维复数 首先要看到二维复数中,对于一维的点,乘以一个i就相当于在二维平面旋转90度,进一步推导出p= cosθ+isinθ,乘这个p,就是将(1,0)绕原点转θ度。p=[cosθ,sinθ](当然,这个转完的东西1维的人只能看到变形的投影)
(4)回到四元数
四元数就是四维的实部和ijk三维虚部组成,四维超球(一个四维单位球)投影到三维空间就是占满了所有空间的一个体,实部大于0的就是三维单位球以内的空间,实部小于零就是外边,单位球就是实部等于0只有ijk的情况,我们就先叫它临界球(三维空间和四维空间的交界处)。
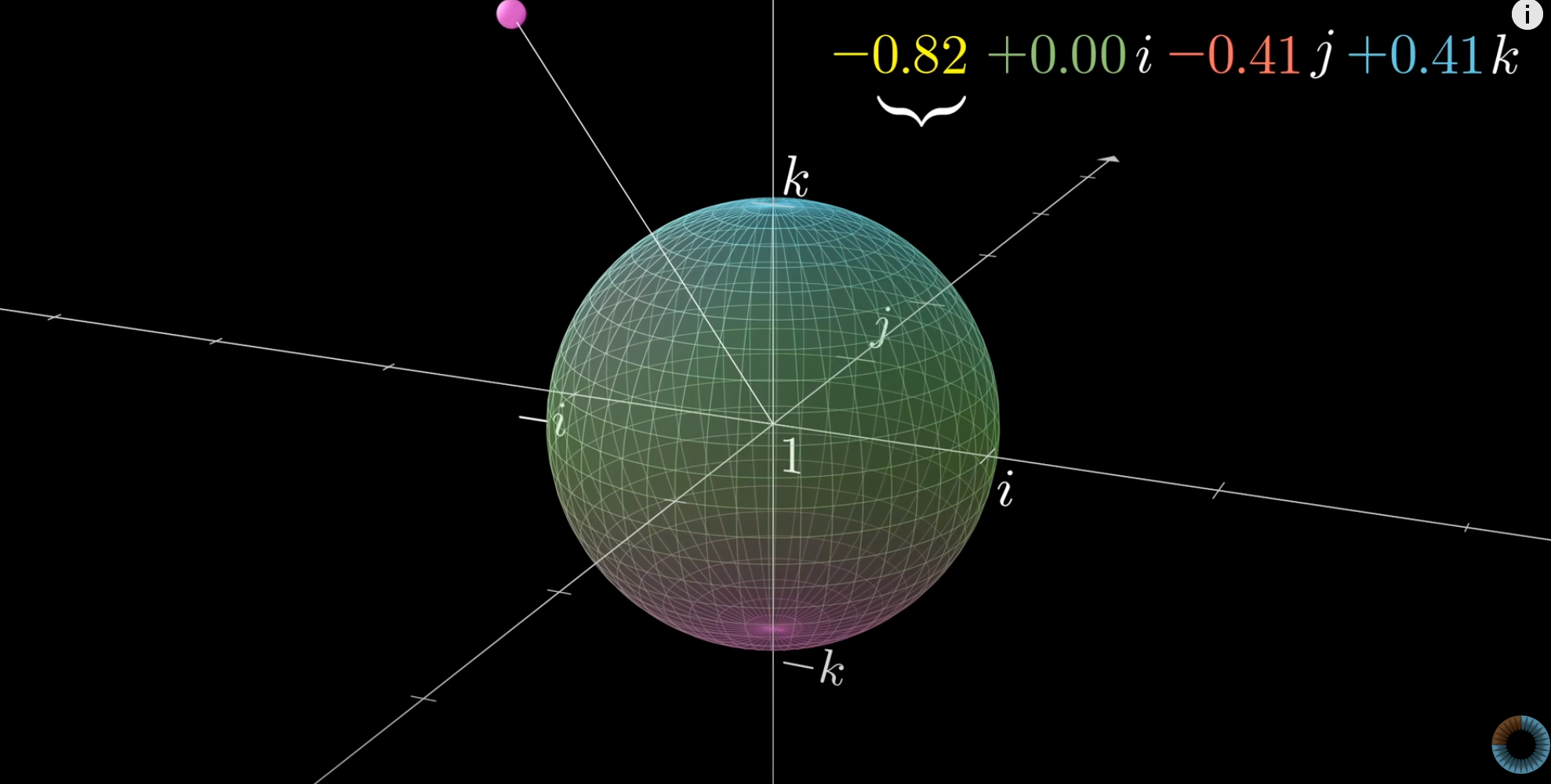
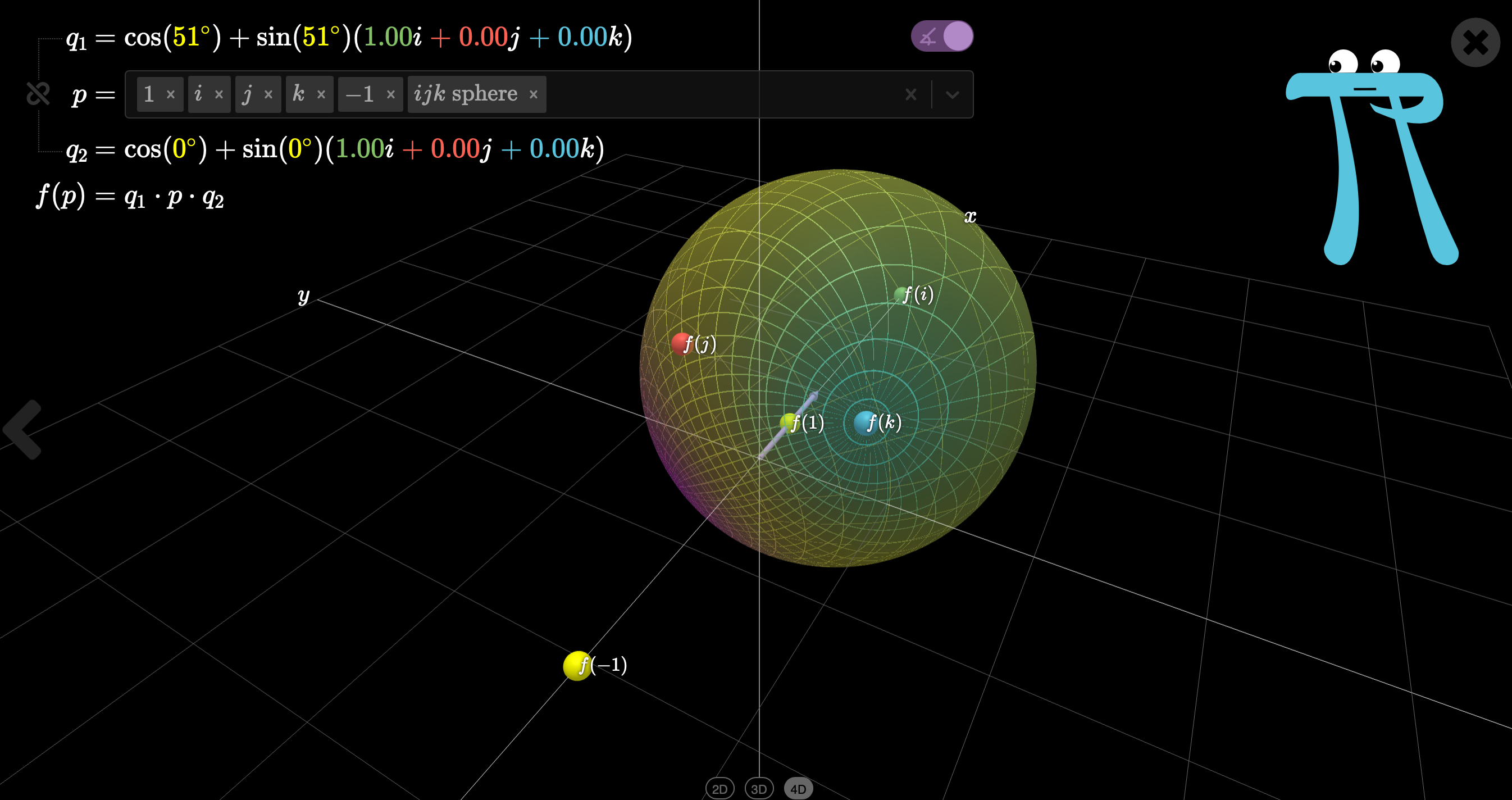
对于三维空间的任意一点,当四维世界(的单位圆)发生旋转时,是将(1,0,0,0)拉扯到该点从而发生了旋转(类比复数表示旋转)。而这一个现象在三维空间中可以理解为两个二维变换,实际上是通过一个轴向的拉伸(这个轴实际上是个圆,实部的-1到1),和一个球体的形变(临界球不再是原来四维空间的位置了)来得到的。这个推导过程可以和之前复数一致,都以ijk为轴先考虑,所以对于特定点(0,1,0,0)先乘一个i,发现它在i方向会拉伸然后回到原点(拉伸),同时j会转向k再到-j(旋转),同理将这个作为一组正交基理解,就发现它可以表达任何一个关于特定矢量为轴的旋转,把二维复数的拉伸旋转类比到四维的,发现是一模一样的变换,只是四维做的旋转操作我们无法理解,而二维的旋转清晰易懂罢了,那么就是在实部cos,虚部sin来最终实现变换效果。
这个过程可以参考https://eater.net/quaternions上大佬做的可视化结果。我们可以看到第一次左乘单位球变形了(也就是说本来映射到三维空间的东西掉到了四维空间(实部大于0去了)。同时我们也看到,确实沿着我们的基准方向旋转了对应的角度。于是再右乘一个共轭,使得ijw其从另外一个方向回到单位球的位置(说明这个点重新回到了三维空间),而基准方向的旋转再次推进了对应角度。于是这个旋转的θ就需要除以二。
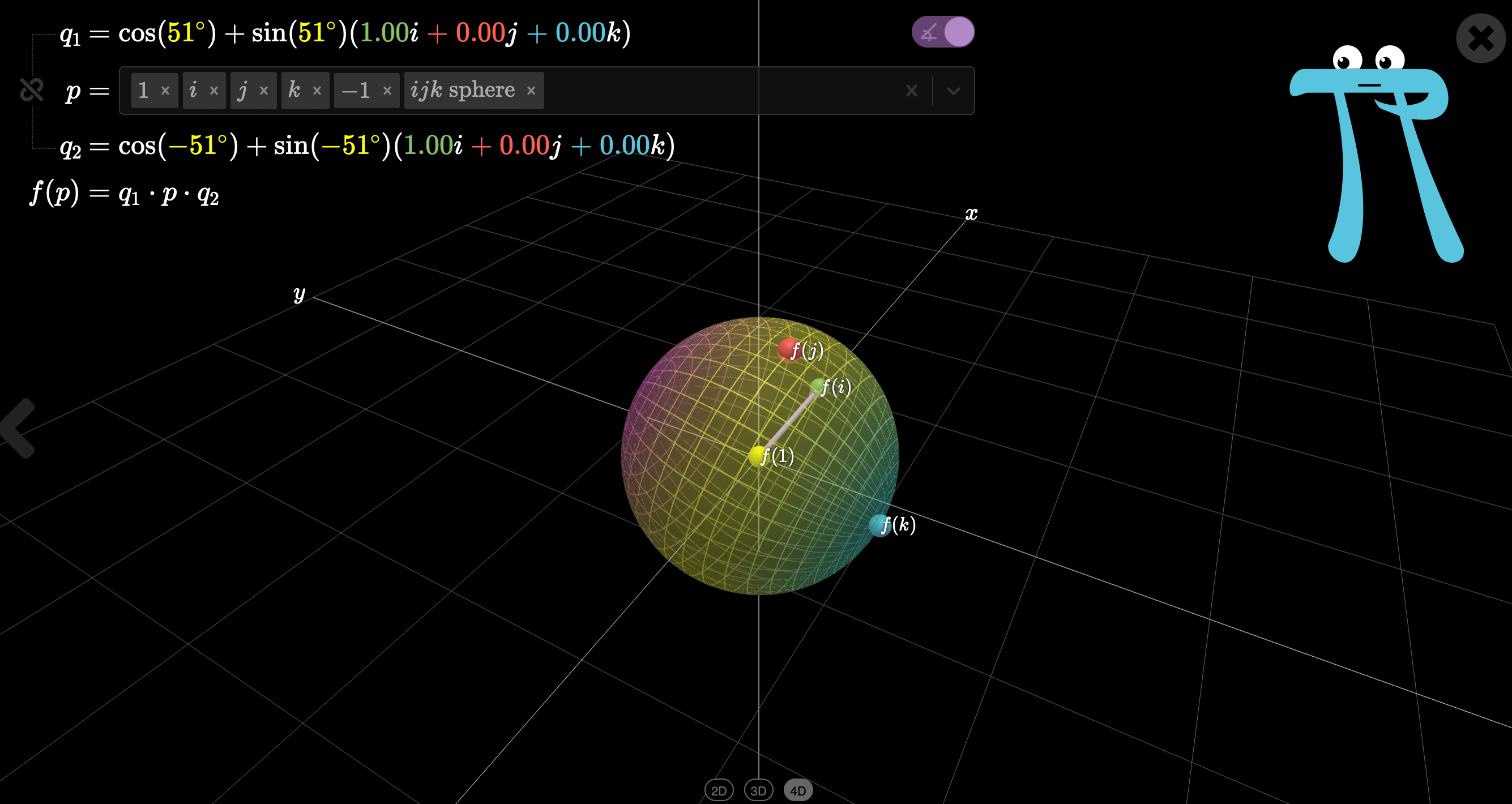
所以得到这个神奇的q四元数最终结论的值就是 q=[cosθ/2,sinθ/2 vector];
放瓦片
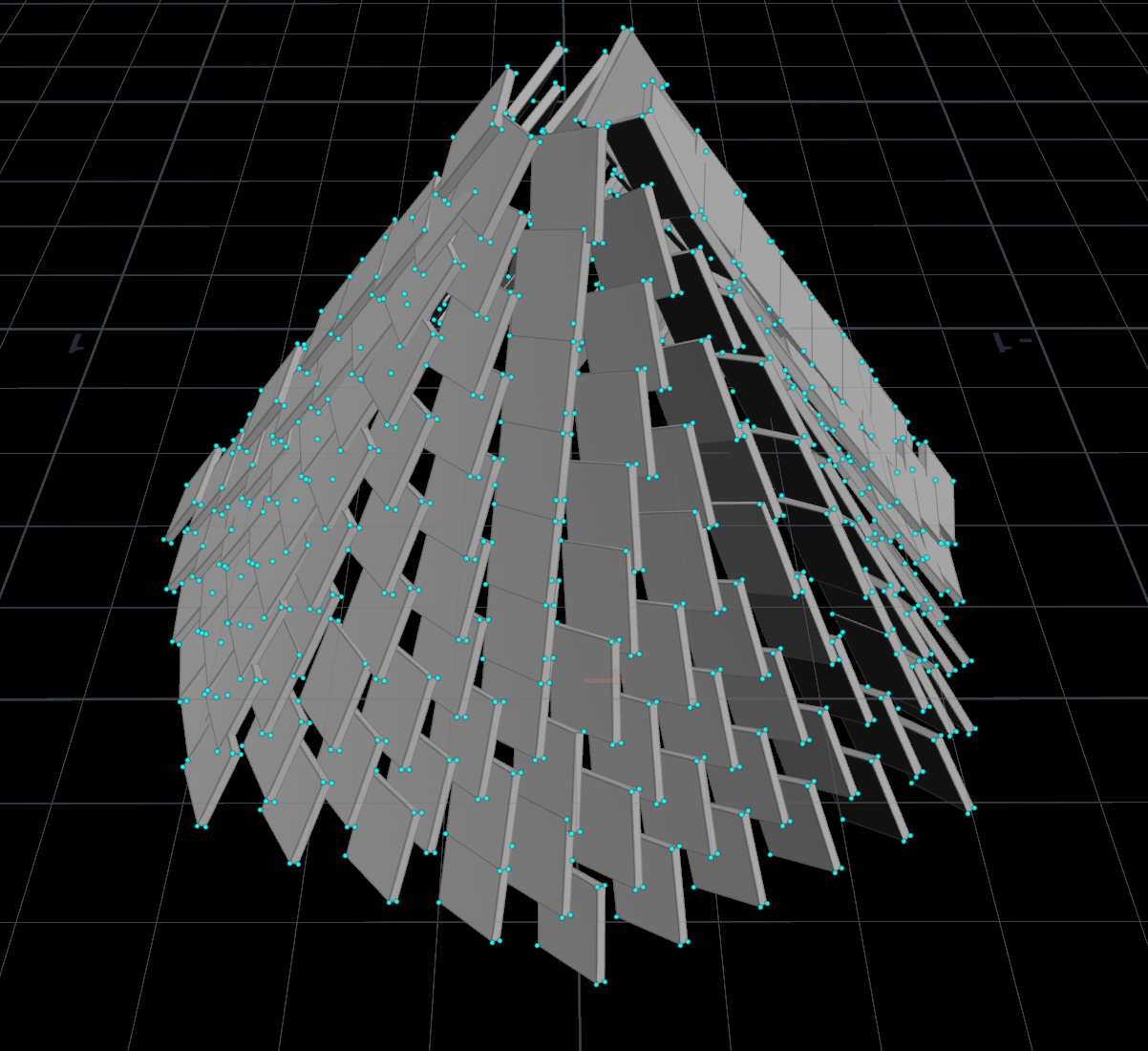
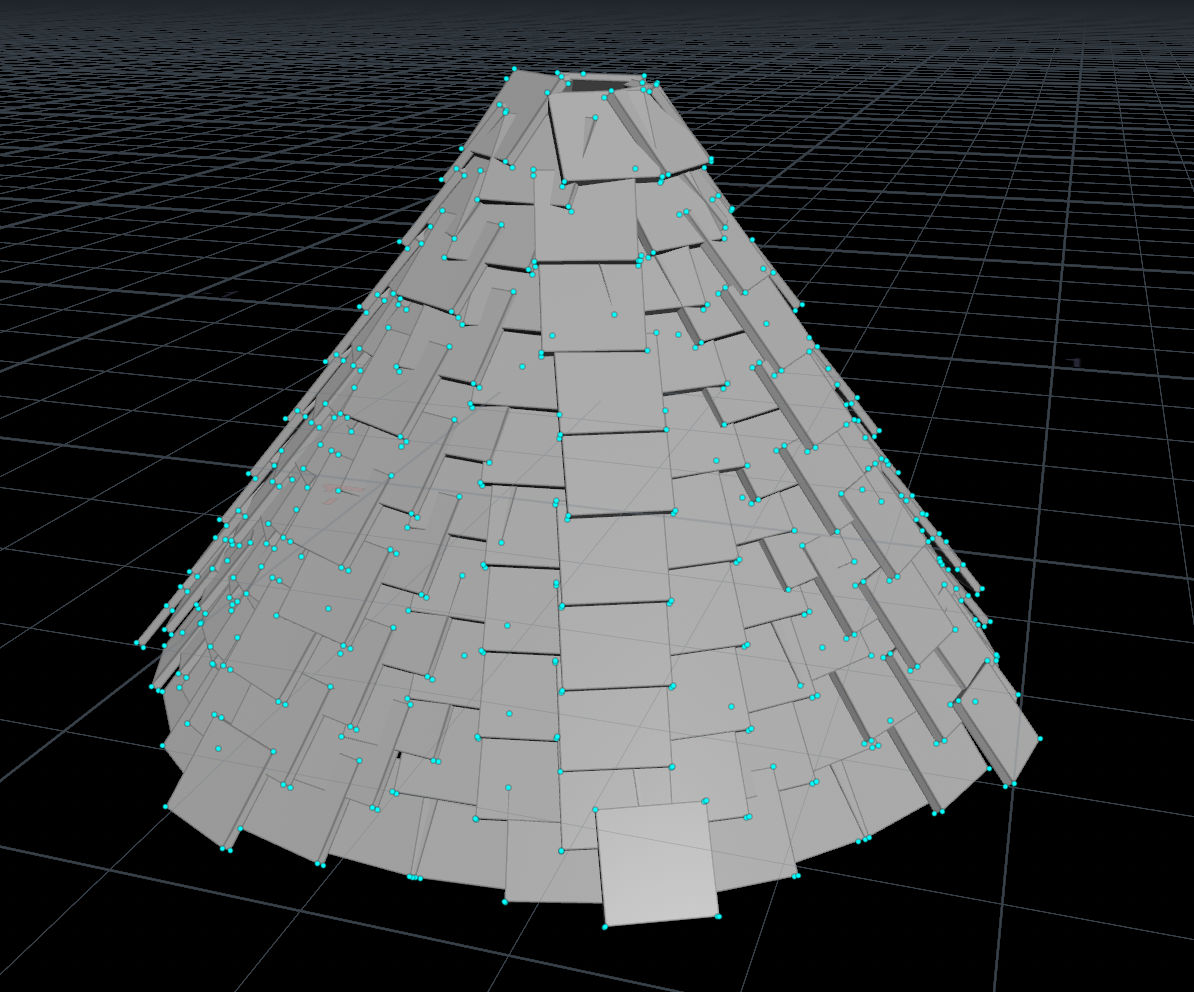
那么,让我们继续湖边小屋的塔楼瓦片搭建,一开始的做法都是用一个tube魔改顶点成cone,然后撒点做瓦片的步骤下面这个图是直接通过copytopoint,存储法线单方向后的效果。
-
第一种方法,直接通过N来控制水平方向,通过copy stamps节点(内置了一个在本地坐标系变换的功能)来实现,随机的变化值可以通过加入一些stamp解决【冬青知乎文章提到的方法就是这个】 简单补充一下copy stamp节点的功能,我可以再stamp列表中添加一个stamp variable,这里的值可以通过
stamp(geometry,para name,index)实现调用,也就是你在包里甚至可以做任何的变换,stamp加参数有一系列的标准变量,可以查文档,用得最多的就是PT 代表点的序号(严格序号为TPT)然后是 NCY代表复制总数。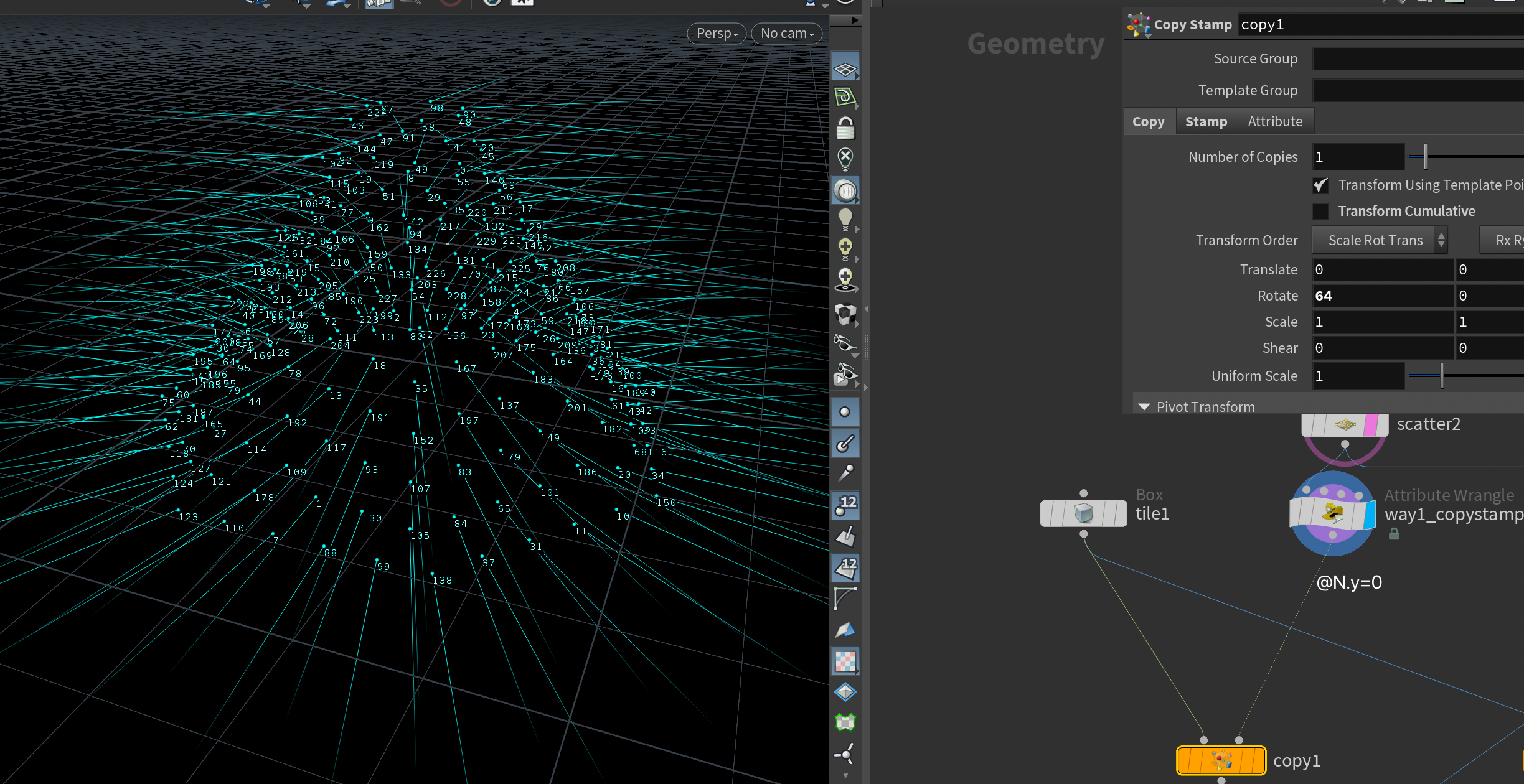
-
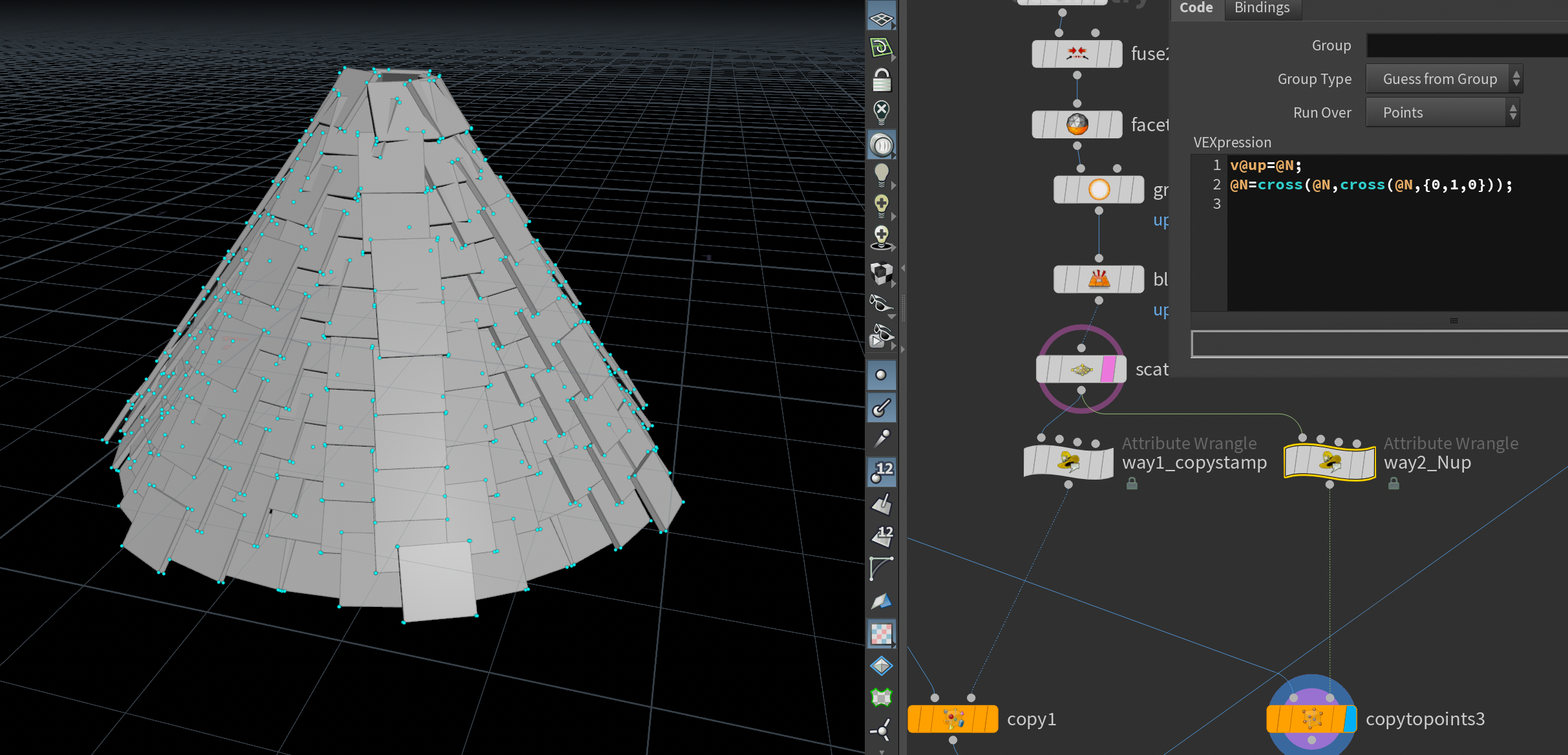
第二种方法,计算出一个切线出来,赋值给新变量up,然后还是用copytopoints节点,然后它自动识别旋转(甚至可以在这里搞点rand的noise,基本效果如下图)还是非常高效且令人满意的,copytopoint的变化读取的优先级为orientation然后就是N和up,前者为四元数旋转表示法则,后者就是定两个轴转过去。
-
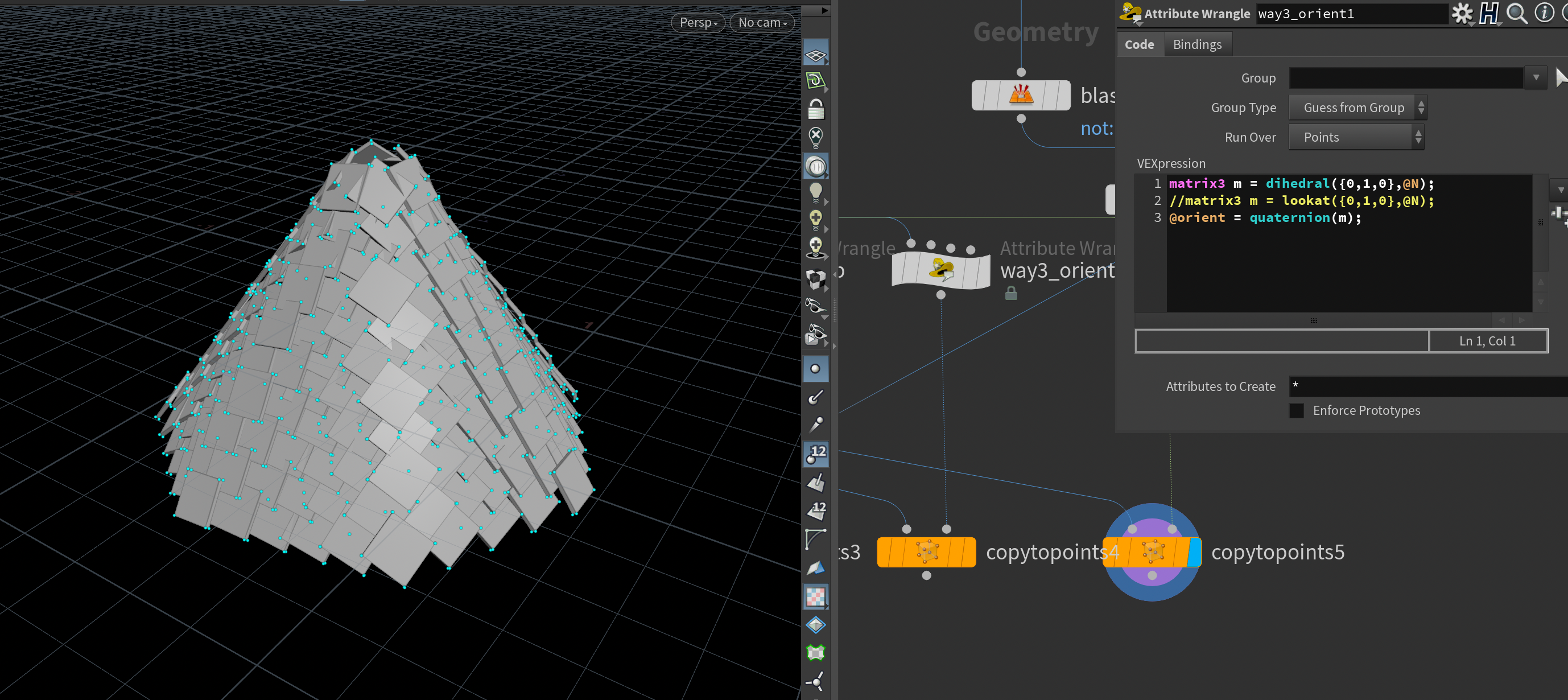
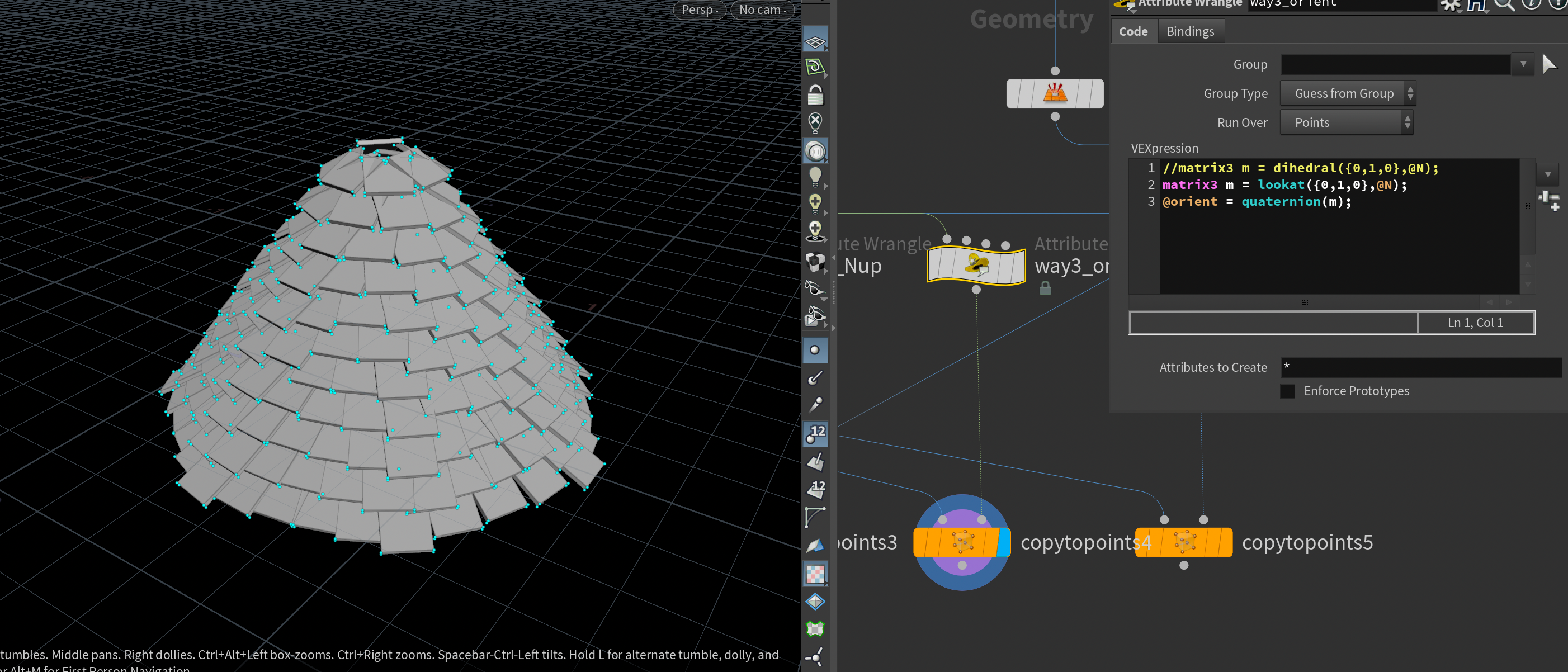
第三种方法,利用orient参数赋值,这里可以用两个函数来生成旋转矩阵然后用quaternion转化为四元数来进行旋转,以下是两个函数的文档说明和应用效果
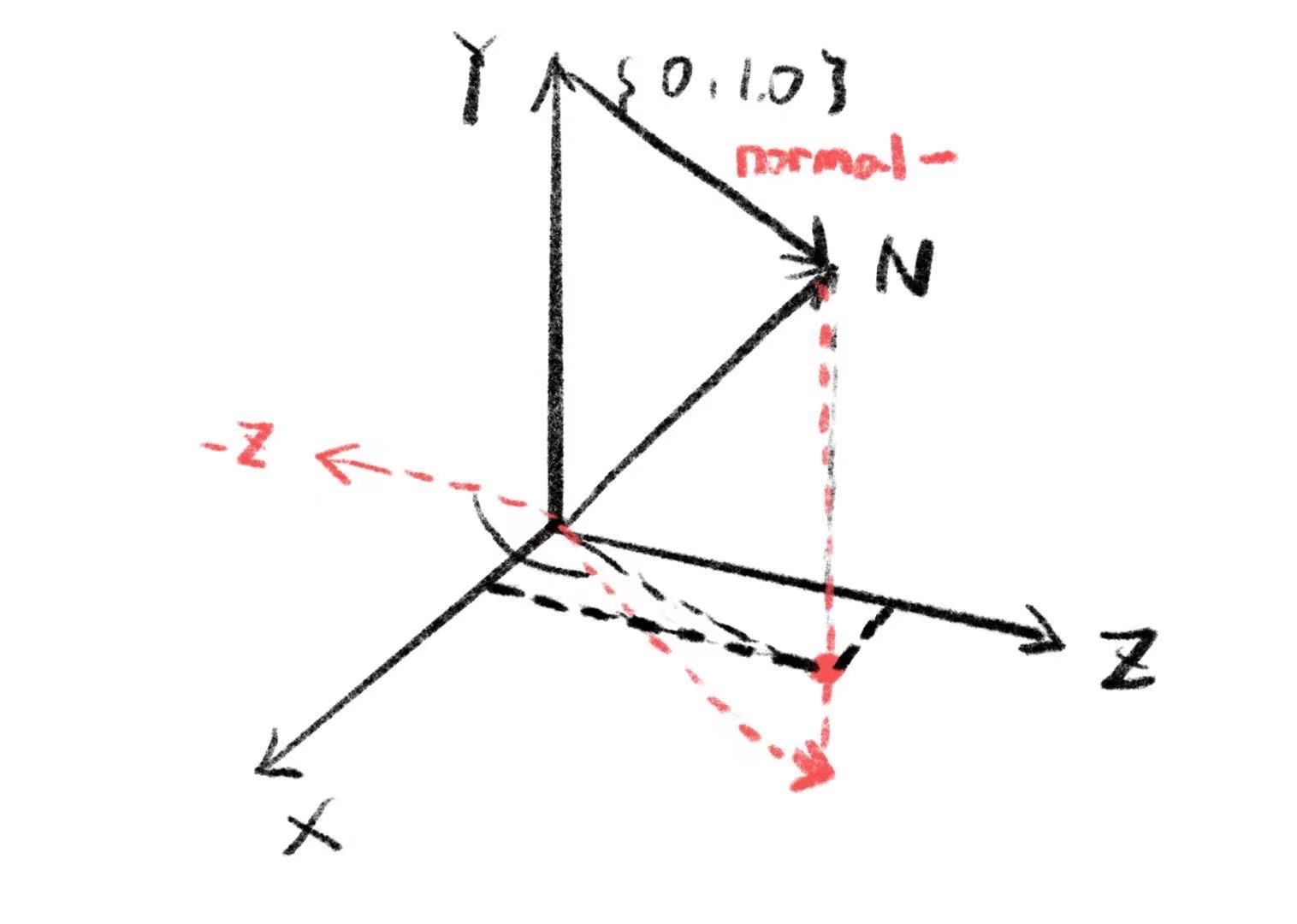
dihedral定义上非常清晰明了,而对于lookat我的理解大概应该是这样,然后-z旋转沿着y轴转的部分自然是对y轴自己无效的,然后剩下沿着NxY的那部分就刚好介于YN两个方向之间,所以图2的效果就会方向正确但是原本的N介于正确的N和Y轴之间。说明也不严格可控。
在结果上这里其实有一个问题并没解决,就是用dihedral虽然结果都是合理的(即均匀分布的旋转),但是结果的y方向转过去了,但是似乎还有一个绕自身y轴的旋转规则加进去了,这个y不是我定义的,但是看起来也不影响旋转规则,所以感觉并不是非常可控,以后有机会再来看看是否有对其进行控制的办法。
其他的旋转相关表示在VEX中的应用:
旋转矩阵的应用:直接做一个坐标轴的旋转(也就是直接用xyz轴的三个矢量set一个3矩阵)旋转的时候通过lookat或者dihedral来计算
rotate函数 对矩阵进行操作,就相当于是在自己的平移基础上乘了一个旋转矩阵(也就是按照旋转后的原点,来进行旋转,(原矩阵,弧度,轴)【主要其实用于传参数做动态】
Radian()转化弧度值
作者: Ayse